|
I am a research engineer in Huawei, working on 3D vision and computer graphics. I obtained my Ph.D degree at the Intelligent Vision Group (IVG), Department of Automation, Tsinghua University, advised by Prof. Jiwen Lu. My research interests lie in 3D vision, especially focusing on 3D scene understanding and 3D reconstruction. I hope my research can help the industry applications. Prior to that, I received my Bachelor's degree from the department of Electronic Engineering, Tsinghua University in 2019 (Ranking 6/245). I have also spent some time at DeePhi Tech (Xilinx), Sensetime , Microsoft Research Asia, XPeng, ByteDance, PhiGent Robtics, Gaussian Robotics and Apple. We are currently recruiting doctoral and master's degree students who will graduate in 2025. If you are interested in 3D vision or computer graphics, please feel free to contact me. Email / Google Scholar / Github / Twitter / Curriculum Vitae |

|
|
|
|
* indicates equal contribution |
|
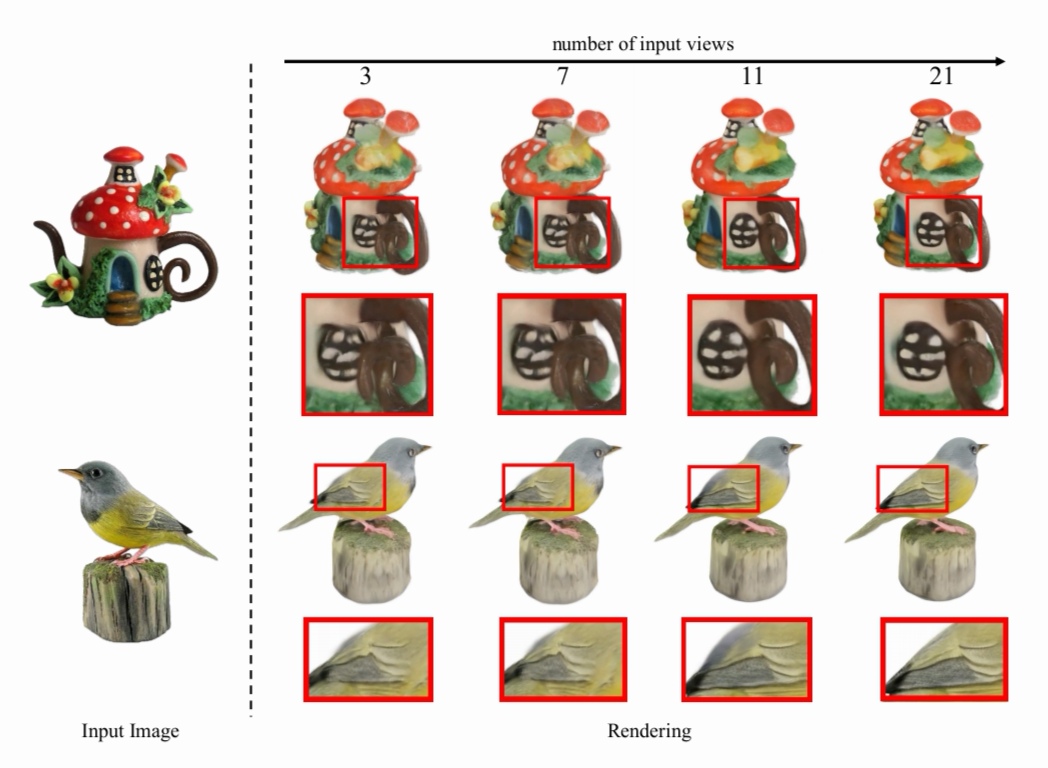
Chubin Zhang, Hongliang Song, Yi Wei, Yu Chen, Jiwen Lu , Yansong Tang Conference on Neural Information Processing Systems (NeurIPS), 2024 [Project page] [arXiv] [Code] We introduce the Geometry-Aware Large Reconstruction Model (GeoLRM), an approach which can predict high-quality assets with 512k Gaussians and 21 input images in only 11 GB GPU memory. |
|
Chubin Zhang*, Juncheng Yan*, Yi Wei*, Jiaxin Li, Li Liu, Yansong Tang, Yueqi Duan, Jiwen Lu arXiv, 2023 [Project page] [arXiv] [Code] We propose an OccNeRF method for self-supervised multi-camera occupancy prediction, which adopts the parameterized occupancy fields, multi-frame photometric loss and open-vocabulary 2D segmentation. |

|
Fangfu Liu, Diankun Wu, Yi Wei, Yongming Rao , Yueqi Duan IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 [Project page] [arXiv] [Code] We propose Sherpa3D, a new text-to-3D framework that achieves high-fidelity, generalizability, and geometric consistency simultaneously. |
|
Yi Wei*, Linqing Zhao*, Wenzhao Zheng, Zheng Zhu, Jie Zhou , Jiwen Lu IEEE International Conference on Computer Vision (ICCV), 2023 [Project page] [arXiv] [Code] We propose a SurroundOcc method to predict the volumetric occupancy with multi-camera images and generate dense occupancy ground truth with sparse LiDAR points. |
|
Xiaofeng Wang*, Zheng Zhu*, Wenbo Xu*, Yunpeng Zhang, Yi Wei, Xu Chi, Yun Ye, Dalong Du, Jiwen Lu , Xingang Wang IEEE International Conference on Computer Vision (ICCV), 2023 [arXiv] [Code] Towards a comprehensive benchmarking of surrounding perception algorithms, we propose OpenOccupancy, which is the first surrounding semantic occupancy perception benchmark. |
|
Ziyi Wang*, Yi Wei*, Yongming Rao , Jie Zhou , Jiwen Lu IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI, IF: 24.31), 2023 [Paper] [Code] We propose Deformable PV-RAFT, where the Spatial Deformation deforms the voxelized neighborhood, and the Temporal Deformation controls the iterative update process. |
|
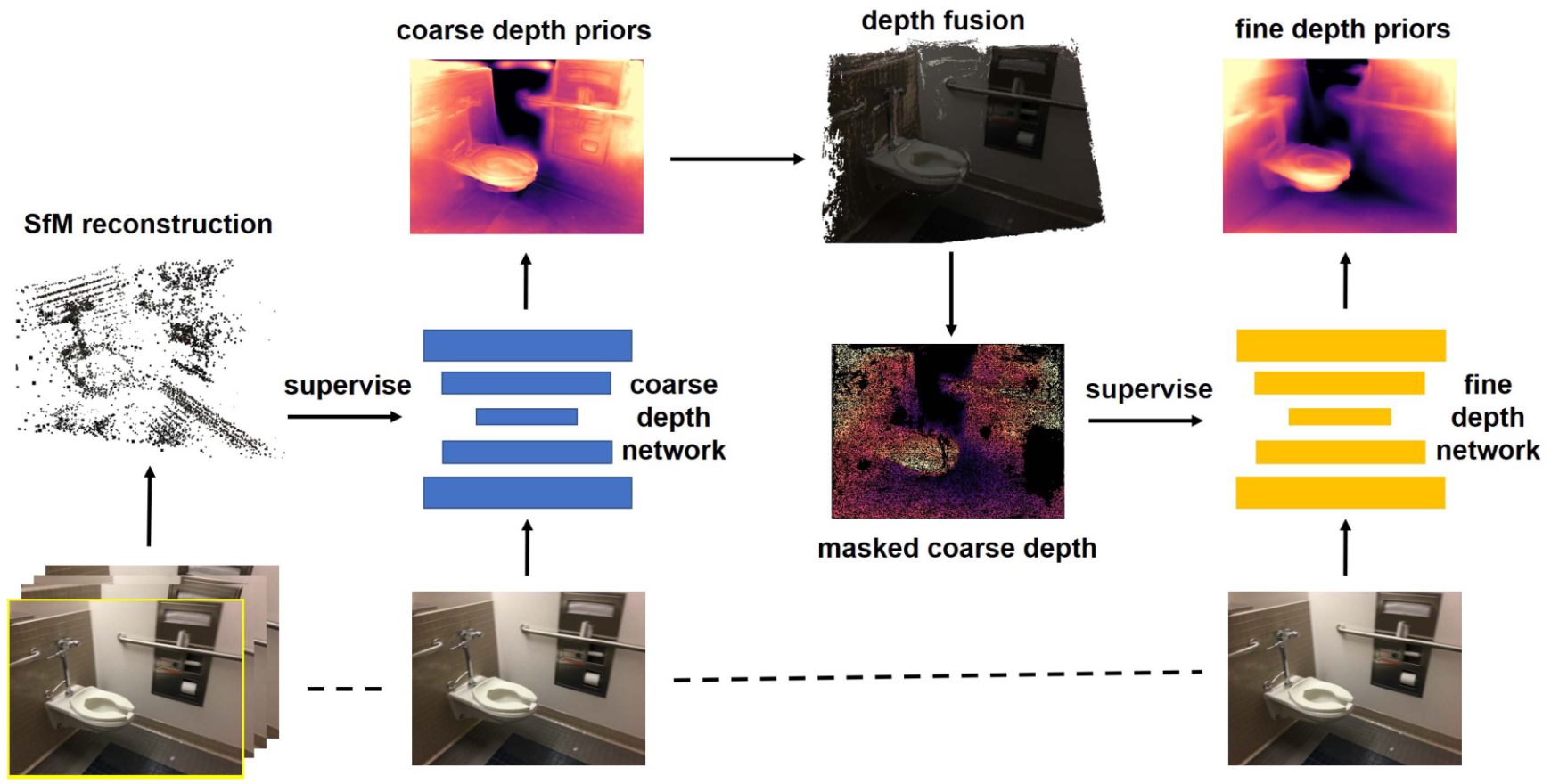
Yi Wei, Shaohui Liu, Jie Zhou , Jiwen Lu IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI, IF: 24.31), 2023 [Paper] [Code] Beyond NerfingMVS, we further present NerfingMVS++, where a coarse-to-fine depth priors training strategy is proposed to directly utilize sparse SfM points and the uniform sampling is replaced by Gaussian sampling to boost the performance. |
|
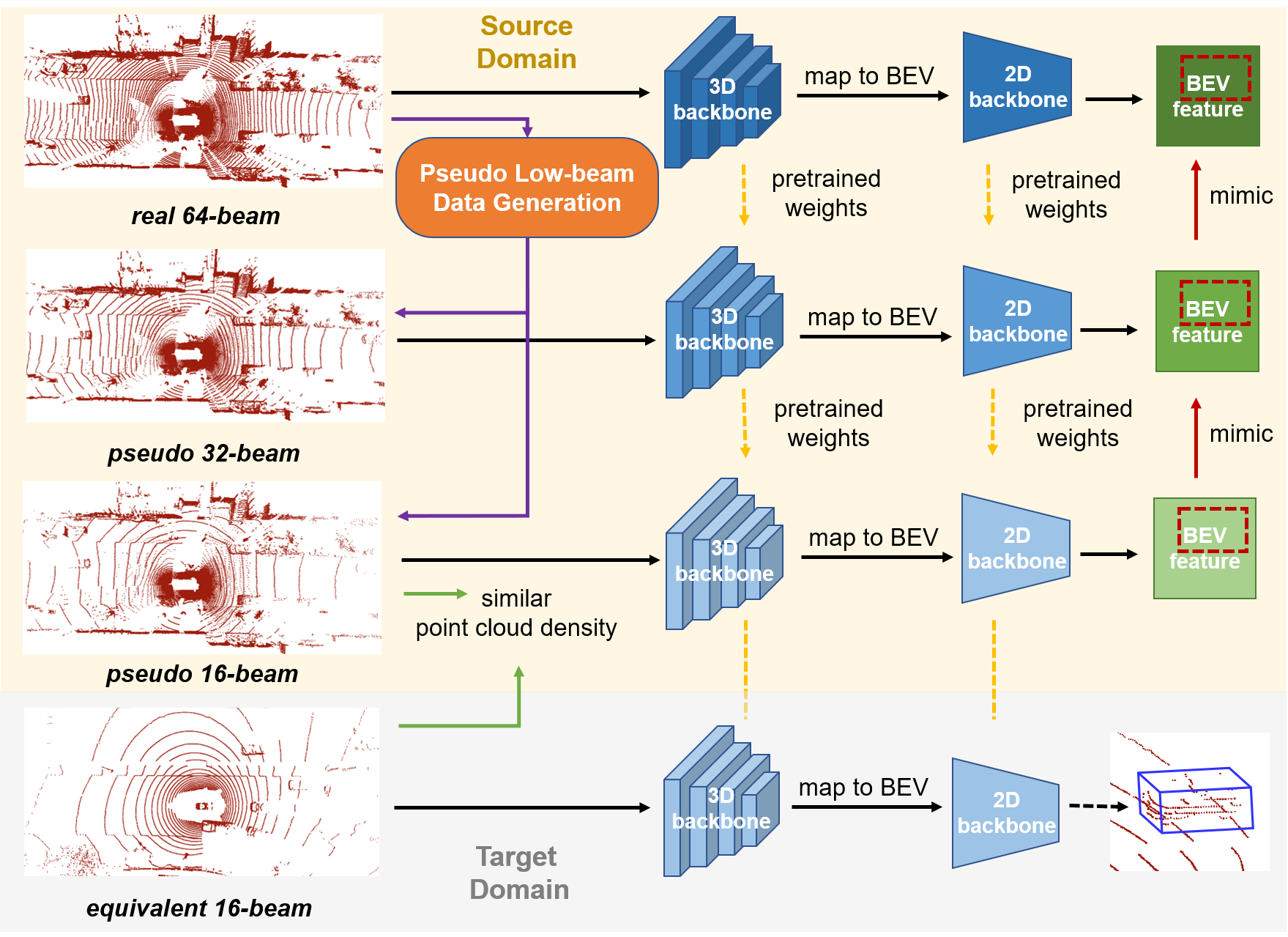
Yi Wei, Zibu Wei, Yongming Rao, Jiaxin Li, Jiwen Lu , Jie Zhou European Conference on Computer Vision (ECCV), 2022 [arXiv] [Code] [中文解读] We propose the LiDAR Distillation to bridge the domain gap induced by different LiDAR beams for 3D object detection. |
|
Yi Wei*, Linqing Zhao*, Wenzhao Zheng, Zheng Zhu, Yongming Rao, Guan Huang, Jiwen Lu , Jie Zhou Conference on Robot Learning (CoRL), 2022 [Project page] [arXiv] [Code] [中文解读] We propose a SurroundDepth method to incorporate the information from multiple surrounding views to predict scale-aware depth maps across cameras. |
|
Yi Wei, Shaohui Liu, Yongming Rao, Wang Zhao, Jiwen Lu , Jie Zhou IEEE International Conference on Computer Vision (ICCV), 2021, Oral Presentation [Project page] [arXiv] [Code] [Video] [中文解读] We present a new multi-view depth estimation method that utilizes both conventional SfM reconstruction and learning-based priors over the recently proposed neural radiance fields (NeRF). |
|
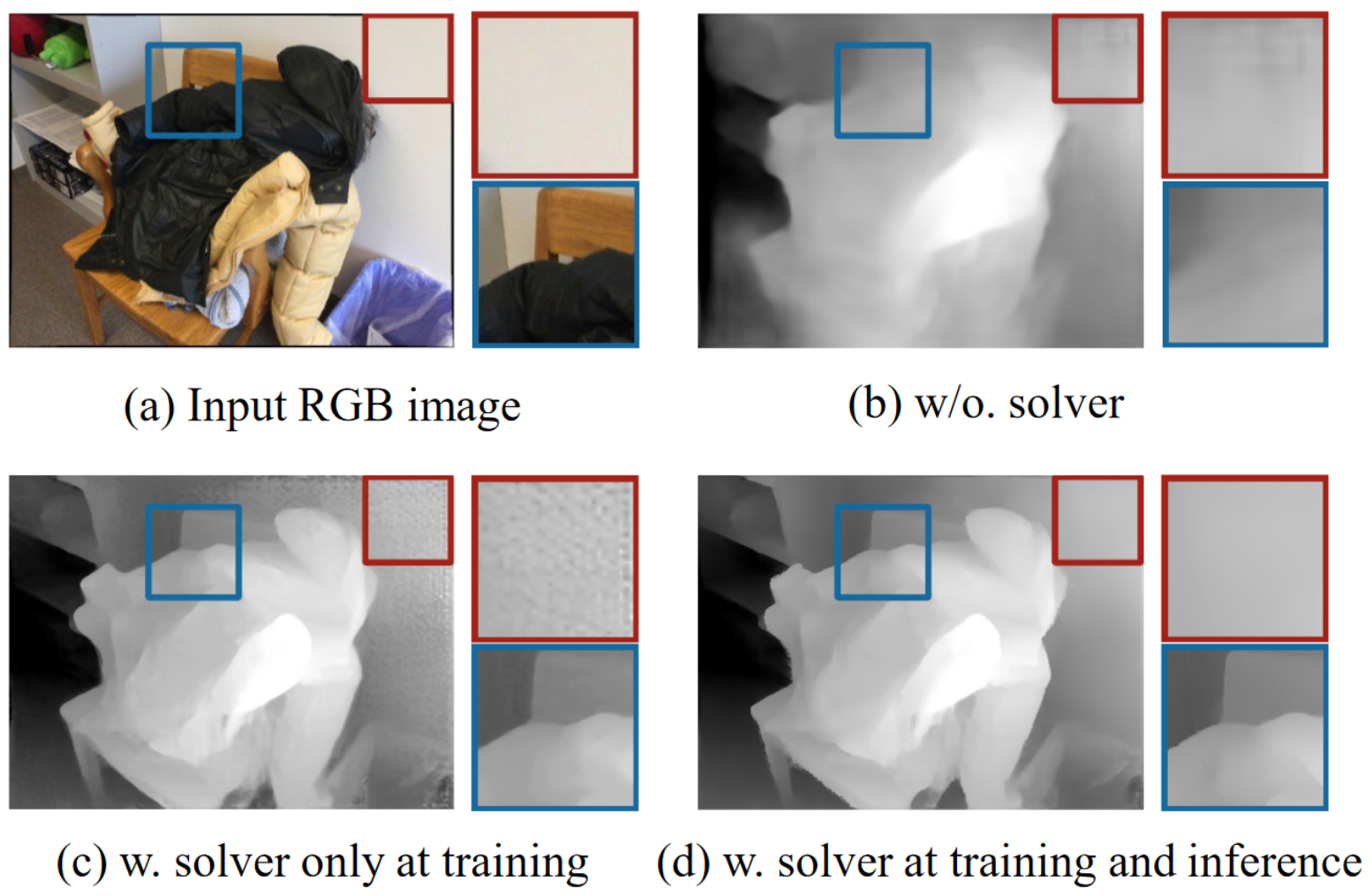
Wang Zhao*, Shaohui Liu*, Yi Wei , Hengkai Guo , Yong-jin Liu IEEE International Conference on Computer Vision (ICCV), 2021 [Project page] [arXiv] [Code] We propose a novel solver that iteratively solves for per-view depth map and normal map by optimizing an energy potential based on the locally planar assumption. |
|
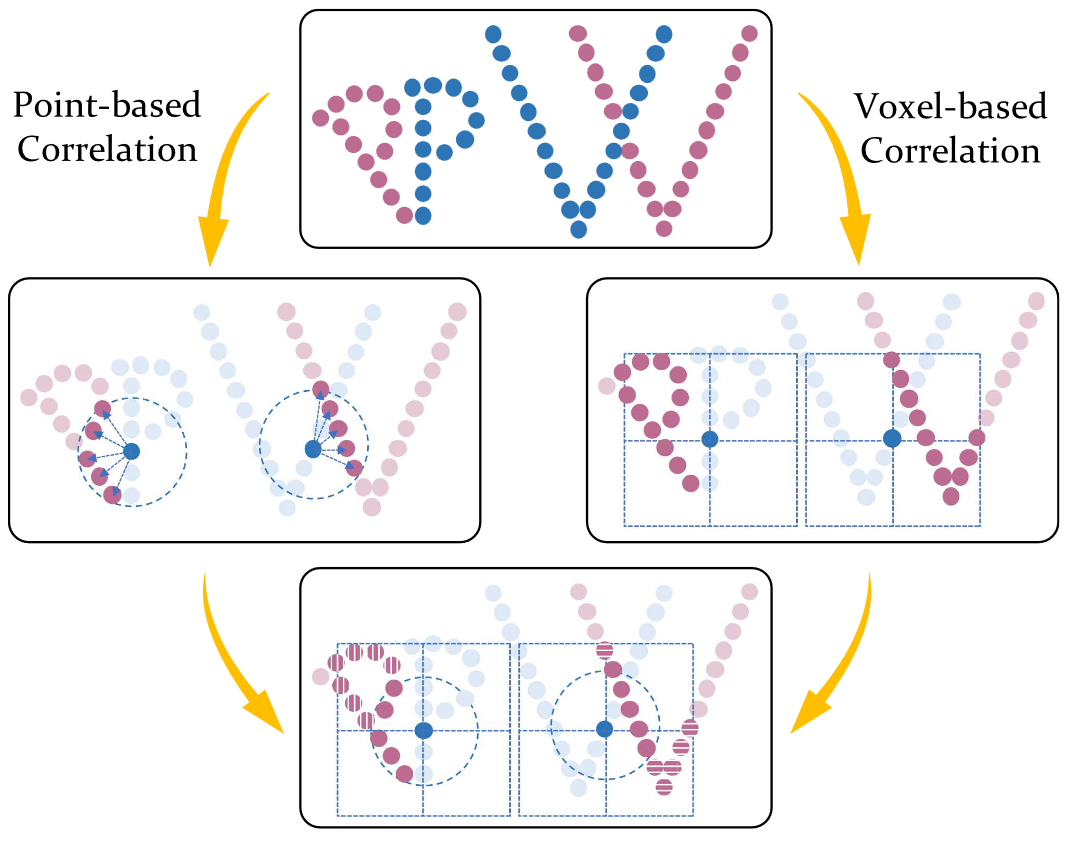
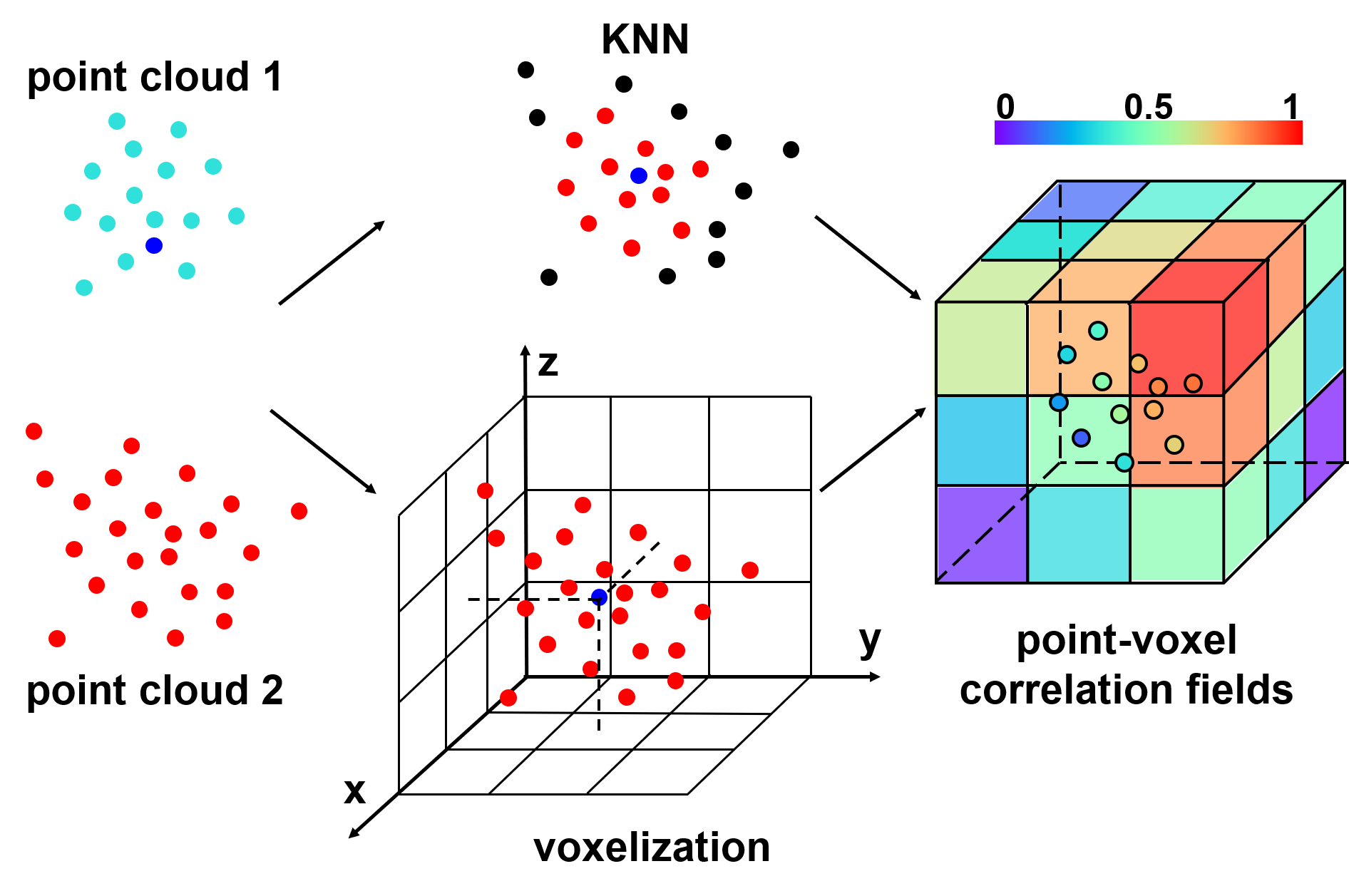
Yi Wei*, Ziyi Wang*, Yongming Rao *, Jiwen Lu , Jie Zhou IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2021 [arXiv] [Code] [Video] We present point-voxel correlation fields for 3D scene flow estimation which migrates the high performance of RAFT and provides a solution to build structured all-pairs correlation fields for unstructured point clouds. |
|
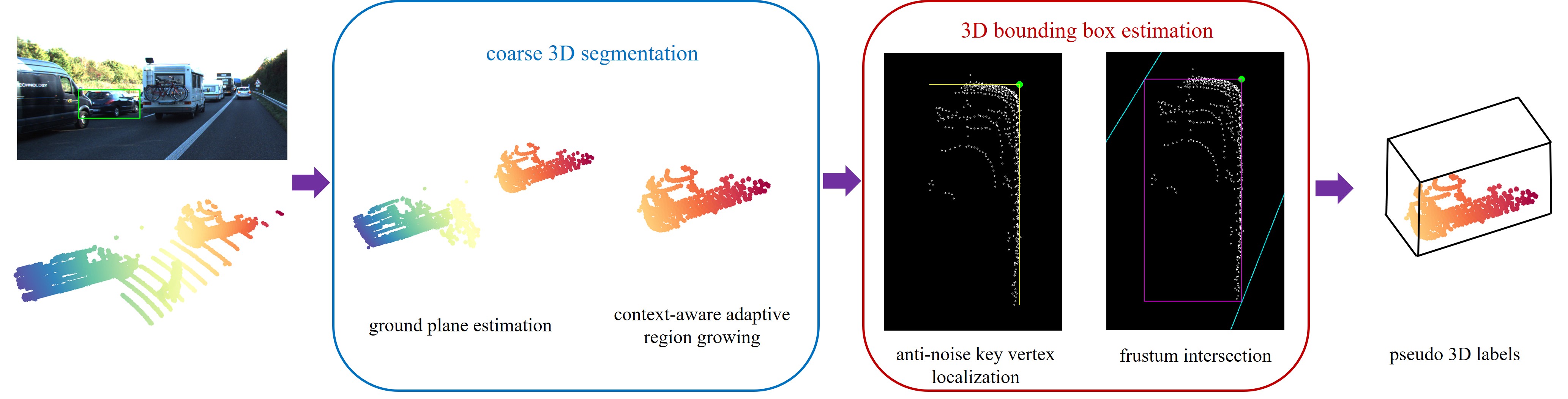
Yi Wei, Shang Su, Jiwen Lu , Jie Zhou IEEE International Conference on Robotics and Automation (ICRA), 2021 [arXiv] [Code] [Video] We propose a weakly supervised 3D detection method without using 3D labels, which consists of coarse 3D segmentation and 3D bounding box estimation two stages. |
|
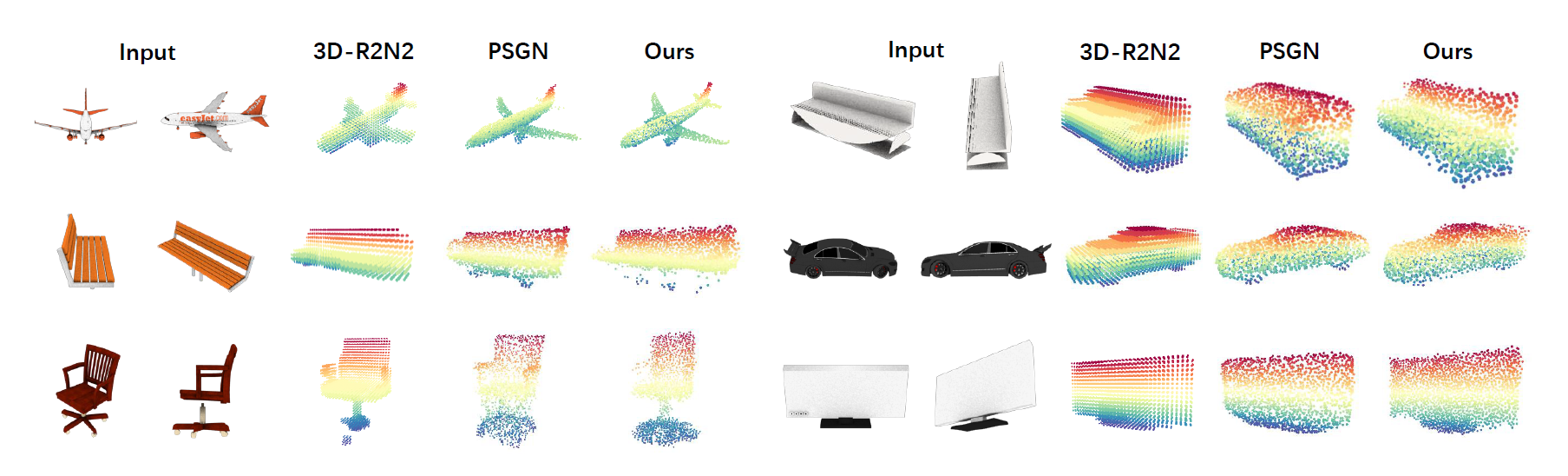
Yi Wei*, Shaohui Liu *, Wang Zhao *, Jiwen Lu , Jie Zhou IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2019 [Project] [arXiv] [Code] we present a new perspective towards image-based shape generation. Unlike most single-view methods which are sometimes insufficient to determine a single groundtruth shape because the back part is occluded, our method levergae multi-view consistency for 3D reconstruction. |
|
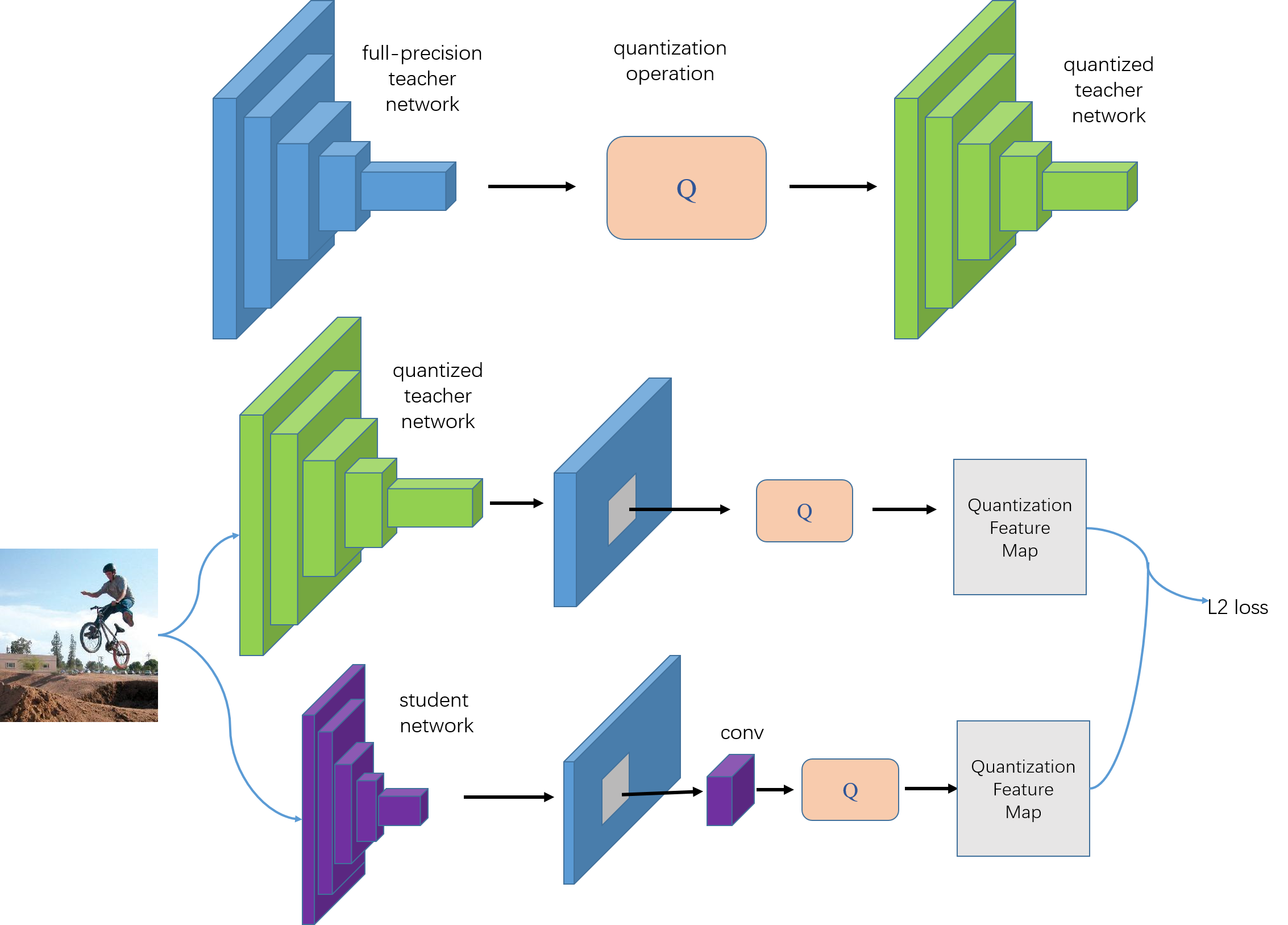
Yi Wei, Xinyu Pan , Hongwei Qin , Junjie Yan European Conference on Computer Vision (ECCV), 2018 [arXiv] we propose a simple and general framework for training very tiny CNNs for object detection. Our method leverages the fact that mimic and quantization can facilitate each other. |
|
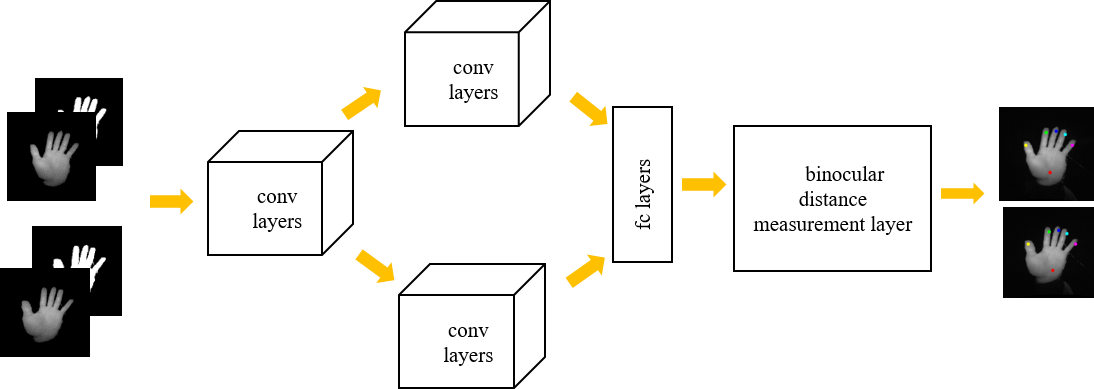
Yi Wei, Guijin Wang , Cairong Zhang , Hengkai Guo , Xinghao Chen , Huazhong Yang , IEEE Visual Communications and Image Processing (VCIP), 2017 (Best Student Paper Award) [arXiv] We propose the Two-Stream Binocular Network (TSBnet) to detect fingertips from binocular images. Different with previous depth-based methods, we directly regress 3D positions of fingertip from left and right images. |
|
|

|
AI/ML Group, Research Intern Topic: 3D AIGC |
|
Gaussian-Tsinghua joint laboratory, Project leader Topic: Sensor calibration, Drivable space detection, LiDAR-based 3D object detection, Depth estimation, 3D reconstruction |

|
SLAM & 3D Vision Group, Engineer&Research Intern Topic: Sky AR, Advertisement AR, Self-supervised depth estimation, Plane-assisted multi-view stereo, Multiple plane detection |

|
LiDAR Group, Engineer Intern Topic: LiDAR-based 3D object detection, LiDAR-based model quantization |

|
Intelligent Multimedia Group, Research Intern Topic: Multi-view hand pose estimation |

|
Video Intelligence Group, Engineer&Research Intern Topic: Model compression |

|
Engineer Intern Topic: Real-time object detection |
|
|
|
|
|
|