|
I am a research engineer in Huawei, working on computer vision, including 3D reconstruction, video generation and world model. I obtained my Ph.D degree at the Intelligent Vision Group (IVG), Department of Automation, Tsinghua University, advised by Prof. Jiwen Lu. Prior to that, I received my Bachelor's degree from the department of Electronic Engineering, Tsinghua University in 2019 (Ranking 6/245). I have also spent some time at DeePhi Tech (Xilinx), Sensetime , Microsoft Research Asia, XPeng, ByteDance, PhiGent Robtics, Gaussian Robotics and Apple. Email / Google Scholar / Github / Twitter / Curriculum Vitae |

|
|
|
|
* indicates equal contribution |
|
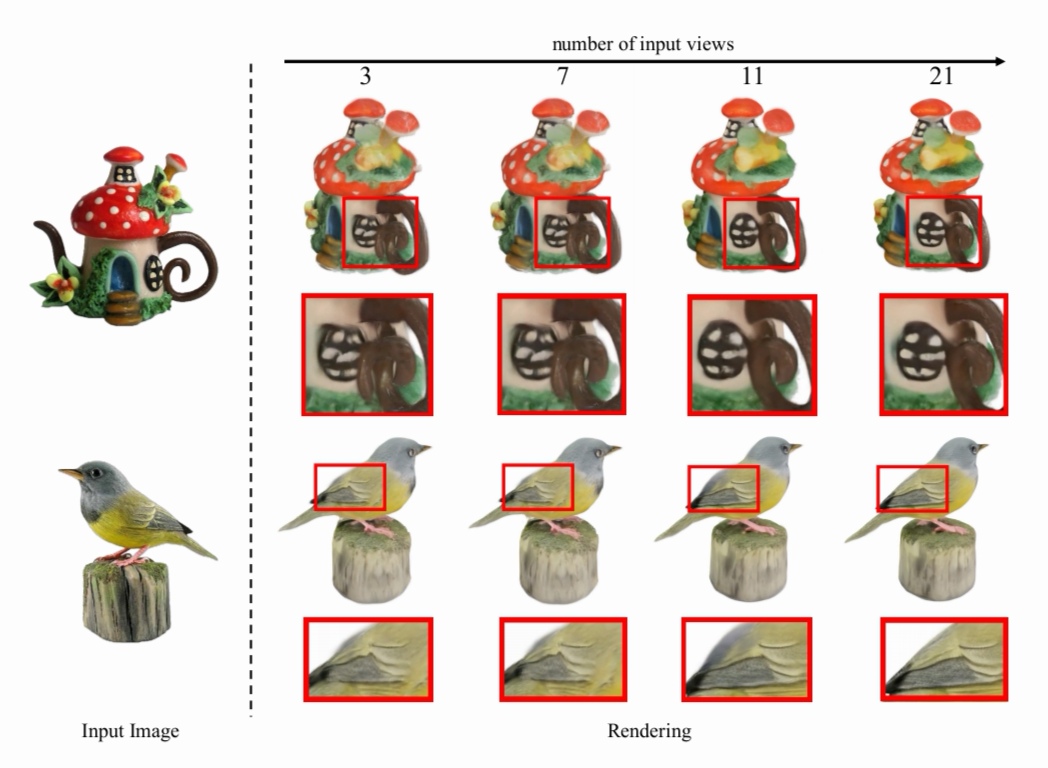
Chubin Zhang, Hongliang Song, Yi Wei, Yu Chen, Jiwen Lu , Yansong Tang Conference on Neural Information Processing Systems (NeurIPS), 2024 [Project page] [arXiv] [Code] We introduce the Geometry-Aware Large Reconstruction Model (GeoLRM), an approach which can predict high-quality assets with 512k Gaussians and 21 input images in only 11 GB GPU memory. |
|
Chubin Zhang*, Juncheng Yan*, Yi Wei*, Jiaxin Li, Li Liu, Yansong Tang, Yueqi Duan, Jiwen Lu arXiv, 2023 [Project page] [arXiv] [Code] We propose an OccNeRF method for self-supervised multi-camera occupancy prediction, which adopts the parameterized occupancy fields, multi-frame photometric loss and open-vocabulary 2D segmentation. |

|
Fangfu Liu, Diankun Wu, Yi Wei, Yongming Rao , Yueqi Duan IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 [Project page] [arXiv] [Code] We propose Sherpa3D, a new text-to-3D framework that achieves high-fidelity, generalizability, and geometric consistency simultaneously. |
|
Yi Wei*, Linqing Zhao*, Wenzhao Zheng, Zheng Zhu, Jie Zhou , Jiwen Lu IEEE International Conference on Computer Vision (ICCV), 2023 [Project page] [arXiv] [Code] We propose a SurroundOcc method to predict the volumetric occupancy with multi-camera images and generate dense occupancy ground truth with sparse LiDAR points. |
|
Xiaofeng Wang*, Zheng Zhu*, Wenbo Xu*, Yunpeng Zhang, Yi Wei, Xu Chi, Yun Ye, Dalong Du, Jiwen Lu , Xingang Wang IEEE International Conference on Computer Vision (ICCV), 2023 [arXiv] [Code] Towards a comprehensive benchmarking of surrounding perception algorithms, we propose OpenOccupancy, which is the first surrounding semantic occupancy perception benchmark. |
|
Ziyi Wang*, Yi Wei*, Yongming Rao , Jie Zhou , Jiwen Lu IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI, IF: 24.31), 2023 [Paper] [Code] We propose Deformable PV-RAFT, where the Spatial Deformation deforms the voxelized neighborhood, and the Temporal Deformation controls the iterative update process. |
|
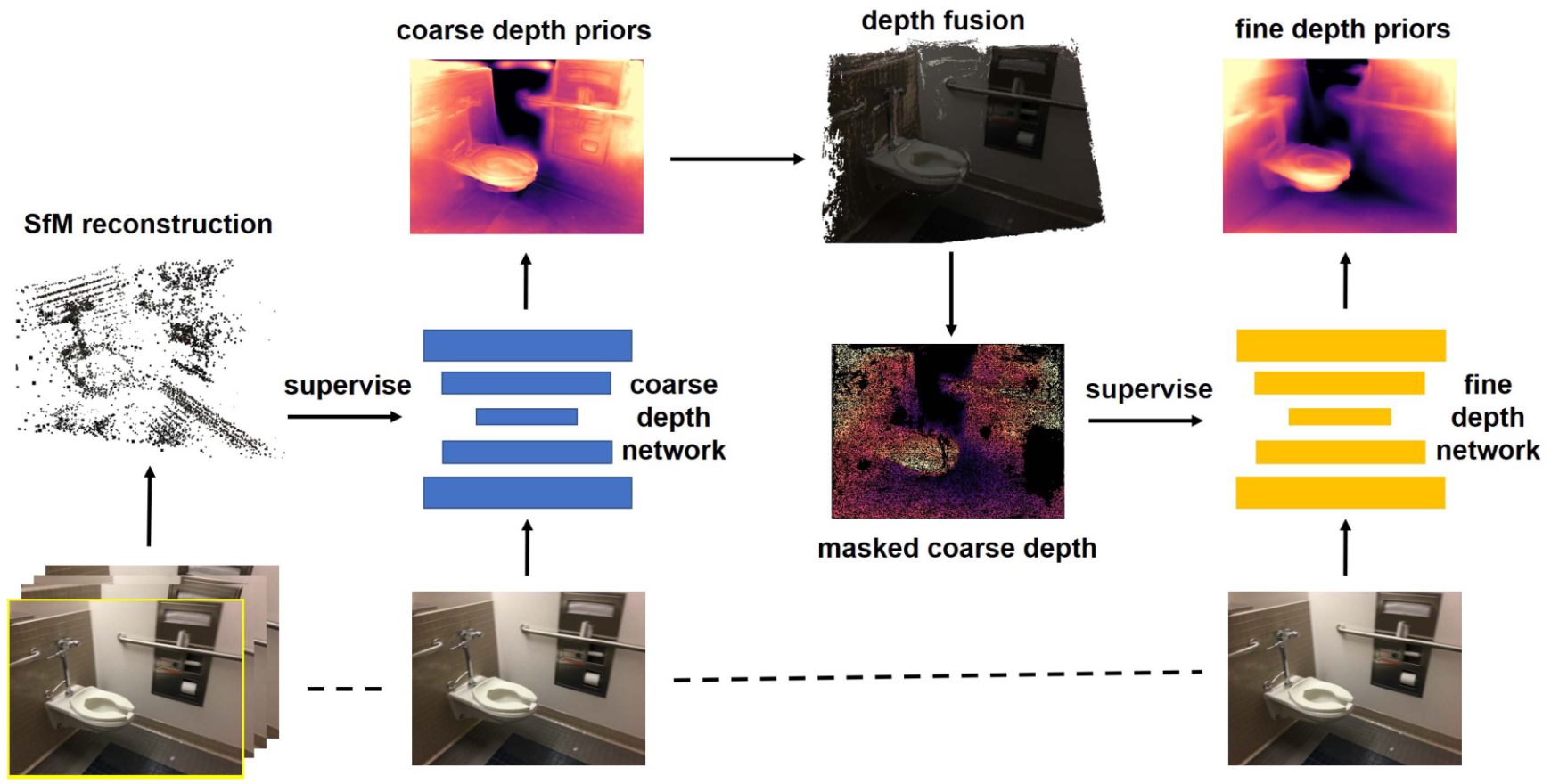
Yi Wei, Shaohui Liu, Jie Zhou , Jiwen Lu IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI, IF: 24.31), 2023 [Paper] [Code] Beyond NerfingMVS, we further present NerfingMVS++, where a coarse-to-fine depth priors training strategy is proposed to directly utilize sparse SfM points and the uniform sampling is replaced by Gaussian sampling to boost the performance. |
|
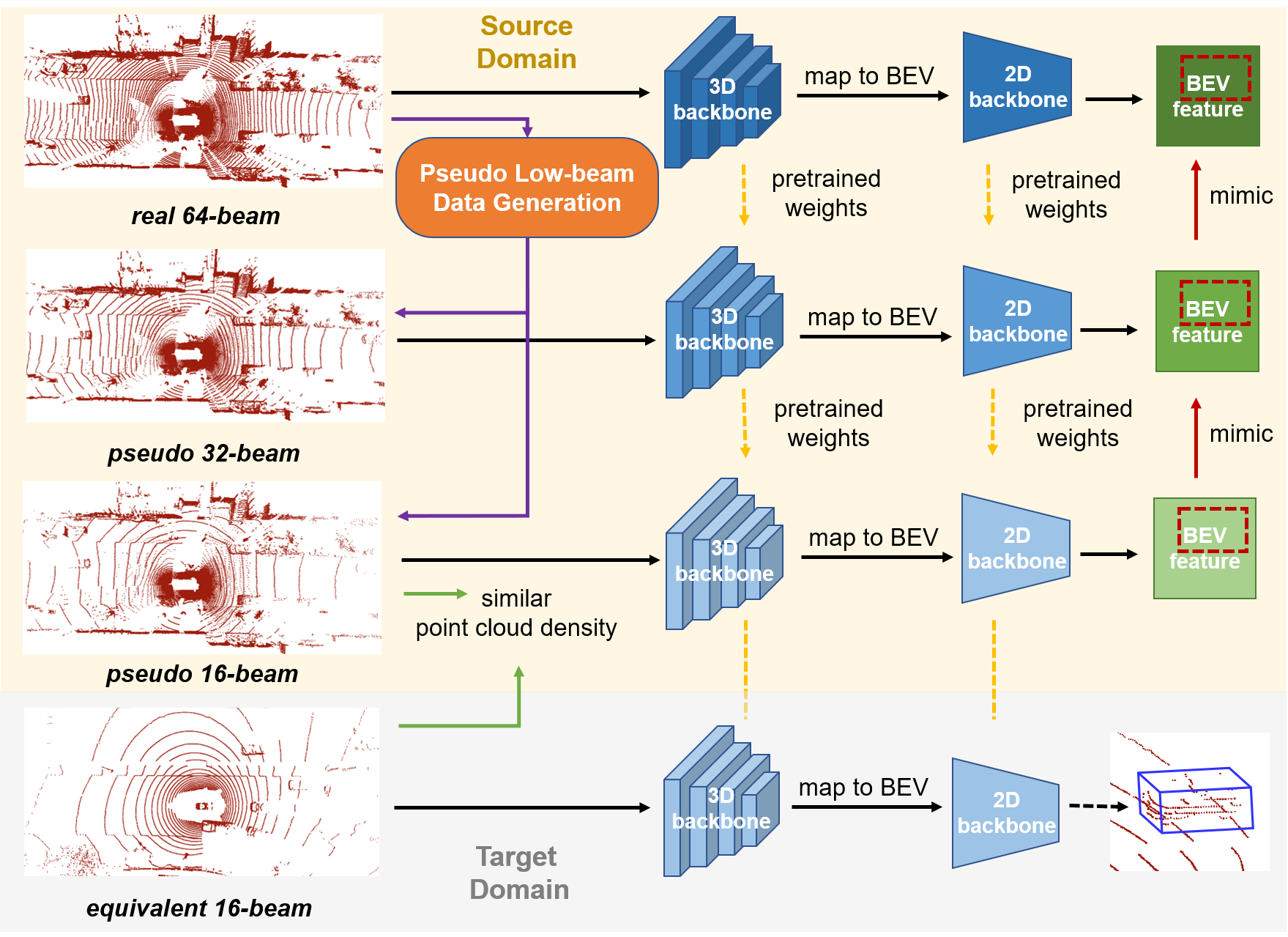
Yi Wei, Zibu Wei, Yongming Rao, Jiaxin Li, Jiwen Lu , Jie Zhou European Conference on Computer Vision (ECCV), 2022 [arXiv] [Code] [中文解读] We propose the LiDAR Distillation to bridge the domain gap induced by different LiDAR beams for 3D object detection. |
|
Yi Wei*, Linqing Zhao*, Wenzhao Zheng, Zheng Zhu, Yongming Rao, Guan Huang, Jiwen Lu , Jie Zhou Conference on Robot Learning (CoRL), 2022 [Project page] [arXiv] [Code] [中文解读] We propose a SurroundDepth method to incorporate the information from multiple surrounding views to predict scale-aware depth maps across cameras. |
|
Yi Wei, Shaohui Liu, Yongming Rao, Wang Zhao, Jiwen Lu , Jie Zhou IEEE International Conference on Computer Vision (ICCV), 2021, Oral Presentation [Project page] [arXiv] [Code] [Video] [中文解读] We present a new multi-view depth estimation method that utilizes both conventional SfM reconstruction and learning-based priors over the recently proposed neural radiance fields (NeRF). |
|
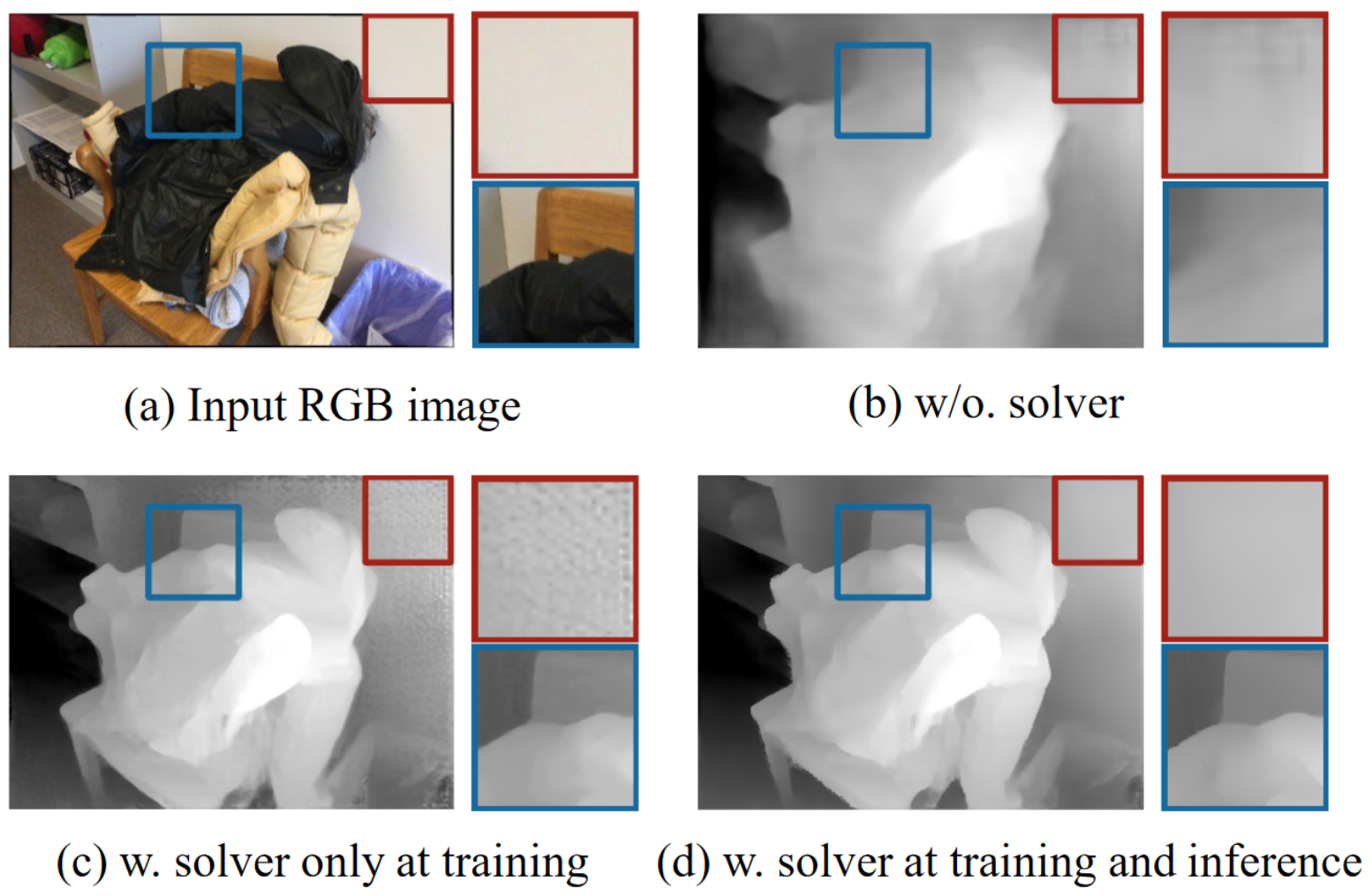
Wang Zhao*, Shaohui Liu*, Yi Wei , Hengkai Guo , Yong-jin Liu IEEE International Conference on Computer Vision (ICCV), 2021 [Project page] [arXiv] [Code] We propose a novel solver that iteratively solves for per-view depth map and normal map by optimizing an energy potential based on the locally planar assumption. |
|
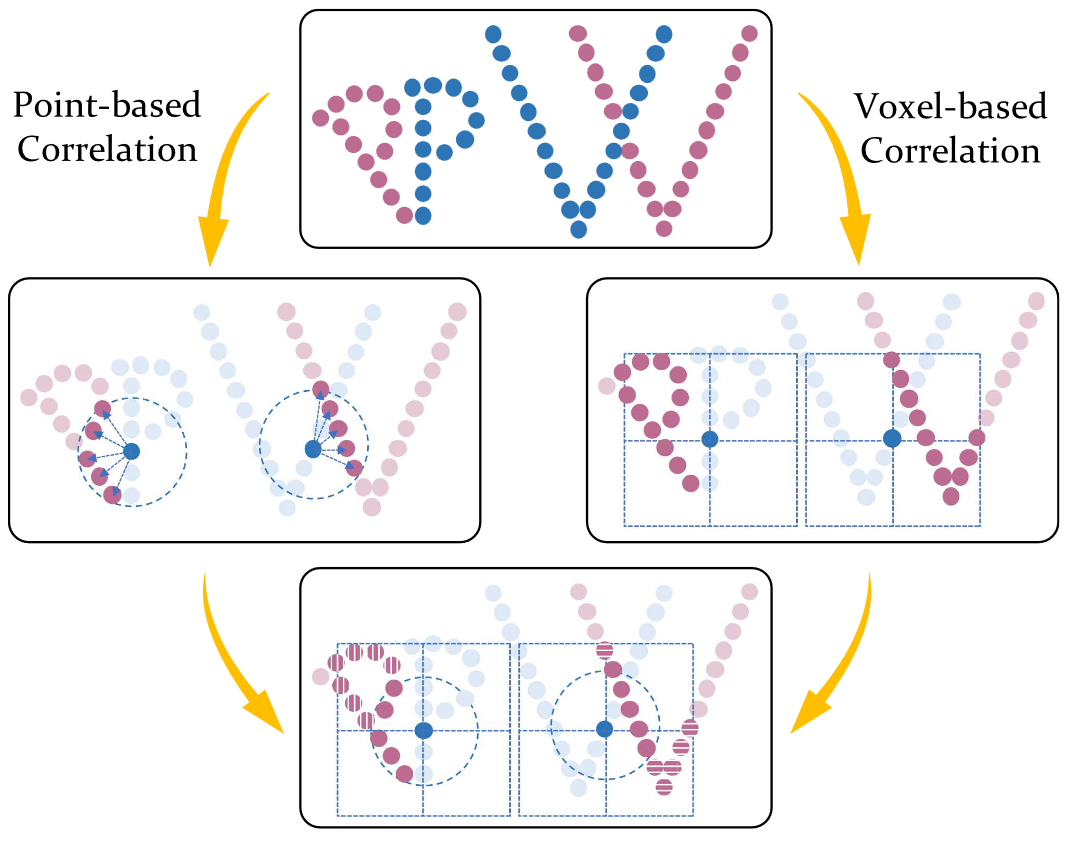
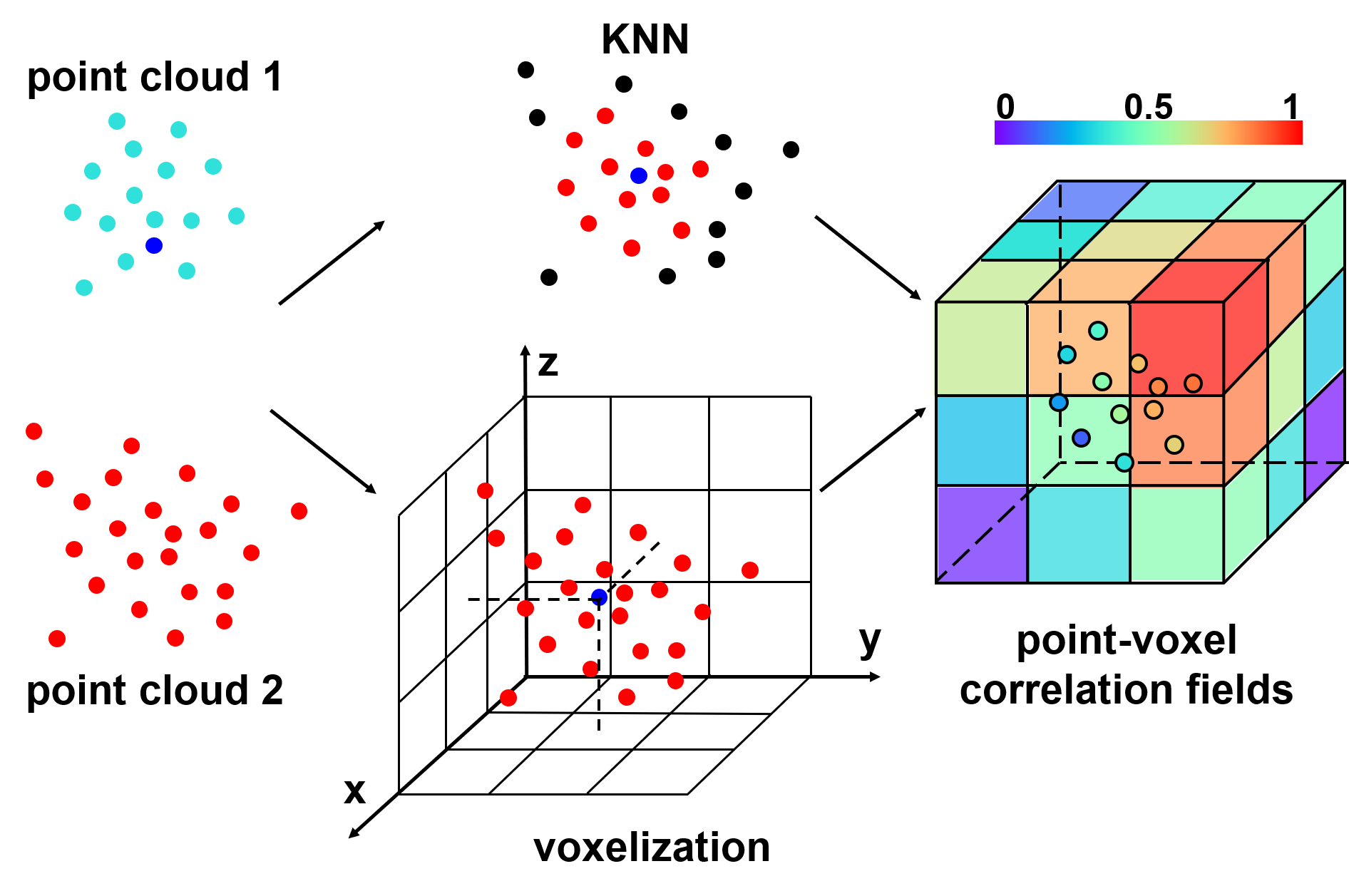
Yi Wei*, Ziyi Wang*, Yongming Rao *, Jiwen Lu , Jie Zhou IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2021 [arXiv] [Code] [Video] We present point-voxel correlation fields for 3D scene flow estimation which migrates the high performance of RAFT and provides a solution to build structured all-pairs correlation fields for unstructured point clouds. |
|
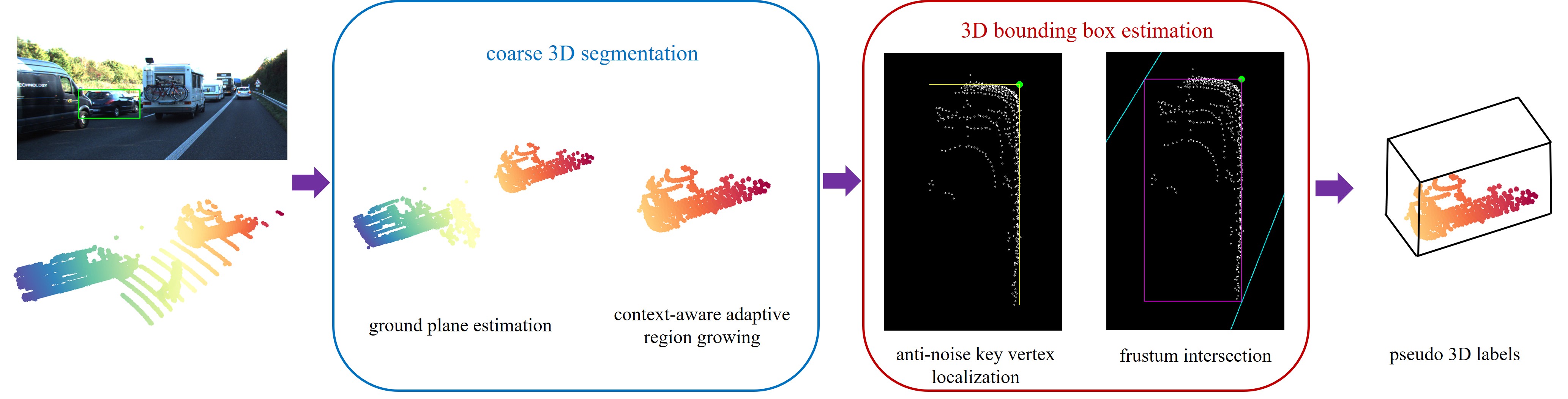
Yi Wei, Shang Su, Jiwen Lu , Jie Zhou IEEE International Conference on Robotics and Automation (ICRA), 2021 [arXiv] [Code] [Video] We propose a weakly supervised 3D detection method without using 3D labels, which consists of coarse 3D segmentation and 3D bounding box estimation two stages. |
|
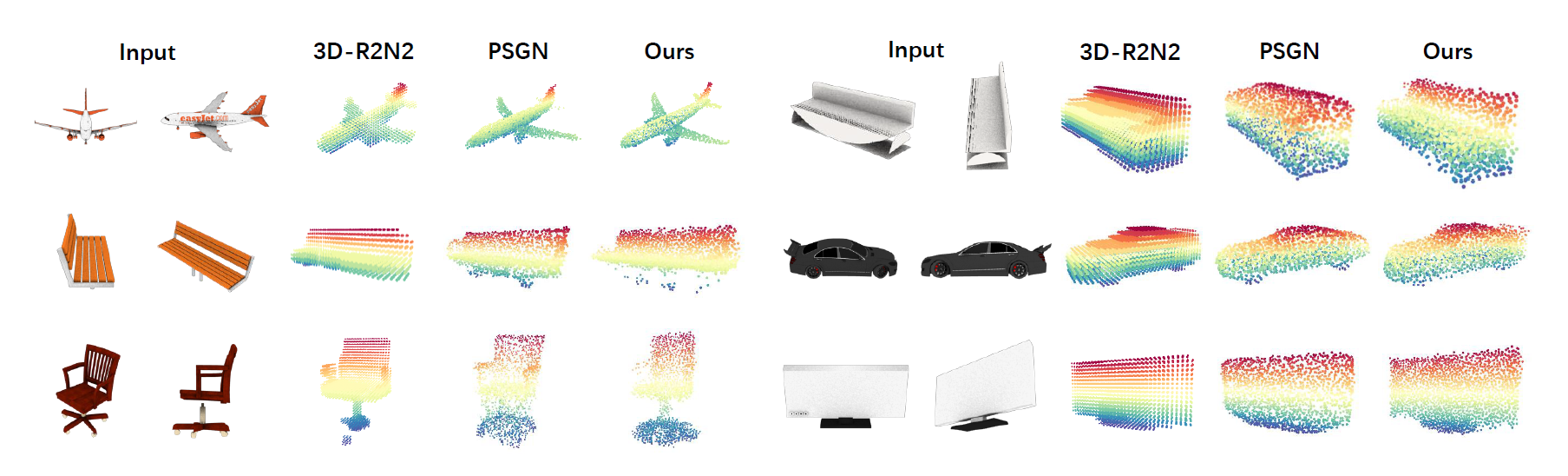
Yi Wei*, Shaohui Liu *, Wang Zhao *, Jiwen Lu , Jie Zhou IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2019 [Project] [arXiv] [Code] we present a new perspective towards image-based shape generation. Unlike most single-view methods which are sometimes insufficient to determine a single groundtruth shape because the back part is occluded, our method levergae multi-view consistency for 3D reconstruction. |
|
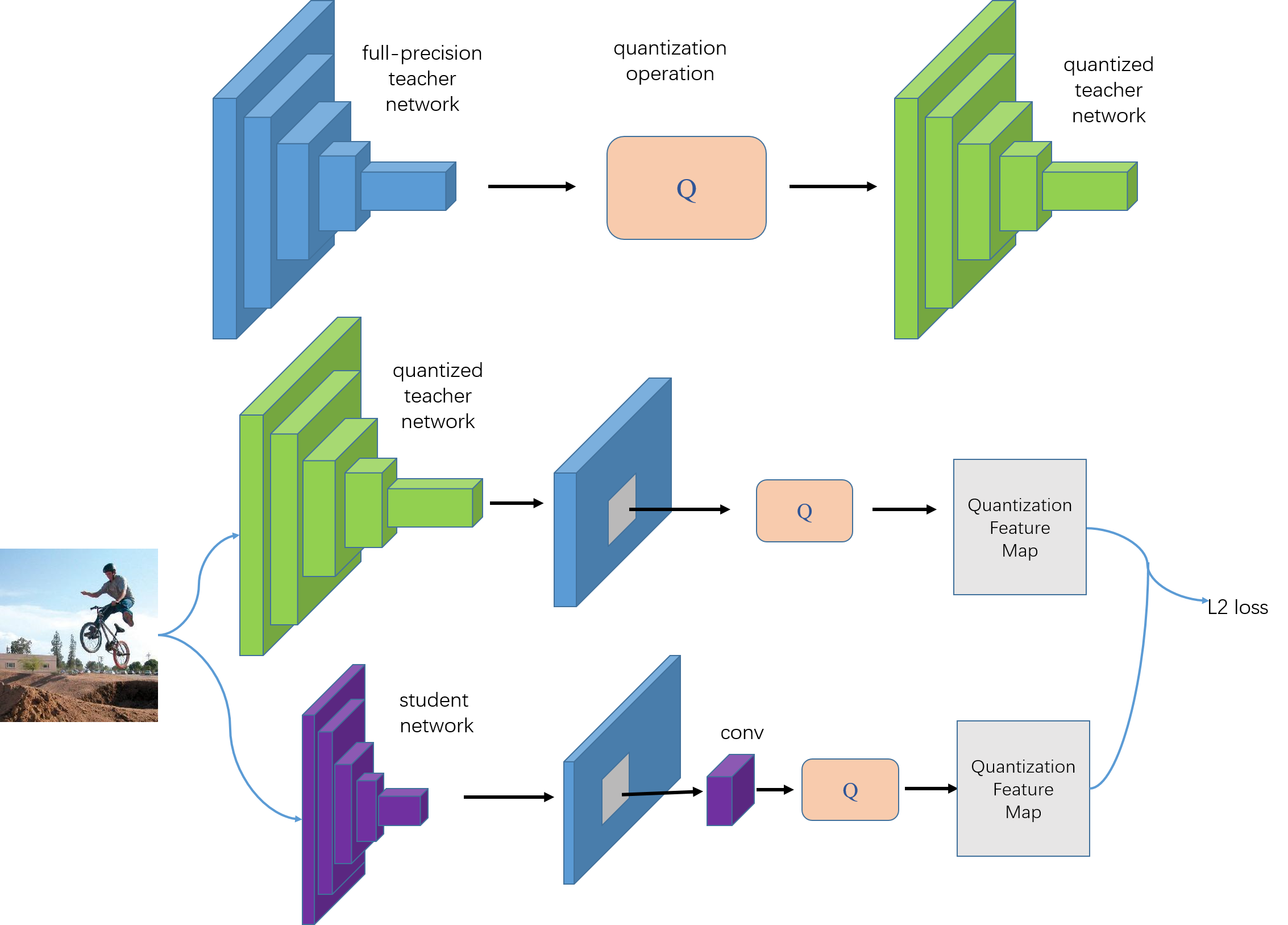
Yi Wei, Xinyu Pan , Hongwei Qin , Junjie Yan European Conference on Computer Vision (ECCV), 2018 [arXiv] we propose a simple and general framework for training very tiny CNNs for object detection. Our method leverages the fact that mimic and quantization can facilitate each other. |
|
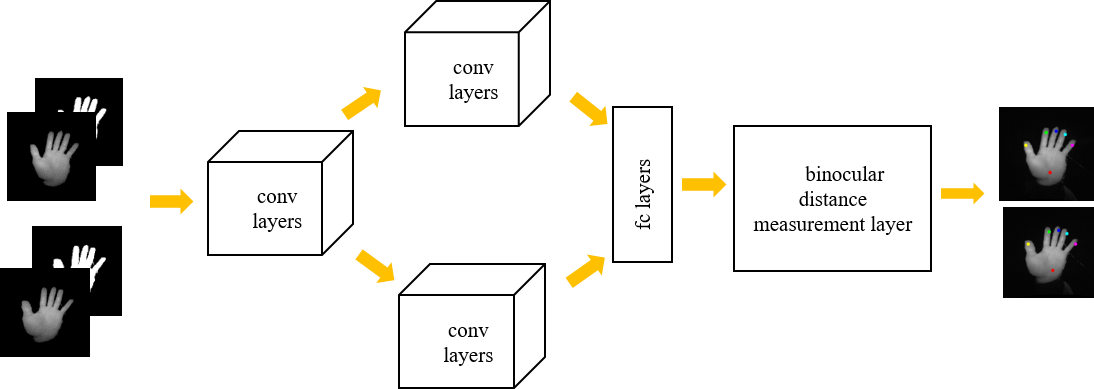
Yi Wei, Guijin Wang , Cairong Zhang , Hengkai Guo , Xinghao Chen , Huazhong Yang , IEEE Visual Communications and Image Processing (VCIP), 2017 (Best Student Paper Award) [arXiv] We propose the Two-Stream Binocular Network (TSBnet) to detect fingertips from binocular images. Different with previous depth-based methods, we directly regress 3D positions of fingertip from left and right images. |
|
|

|
AI/ML Group, Research Intern Topic: 3D AIGC |
|
Gaussian-Tsinghua joint laboratory, Project leader Topic: Sensor calibration, Drivable space detection, LiDAR-based 3D object detection, Depth estimation, 3D reconstruction |

|
SLAM & 3D Vision Group, Engineer&Research Intern Topic: Sky AR, Advertisement AR, Self-supervised depth estimation, Plane-assisted multi-view stereo, Multiple plane detection |

|
LiDAR Group, Engineer Intern Topic: LiDAR-based 3D object detection, LiDAR-based model quantization |

|
Intelligent Multimedia Group, Research Intern Topic: Multi-view hand pose estimation |

|
Video Intelligence Group, Engineer&Research Intern Topic: Model compression |

|
Engineer Intern Topic: Real-time object detection |
|
|
|
|
|
|